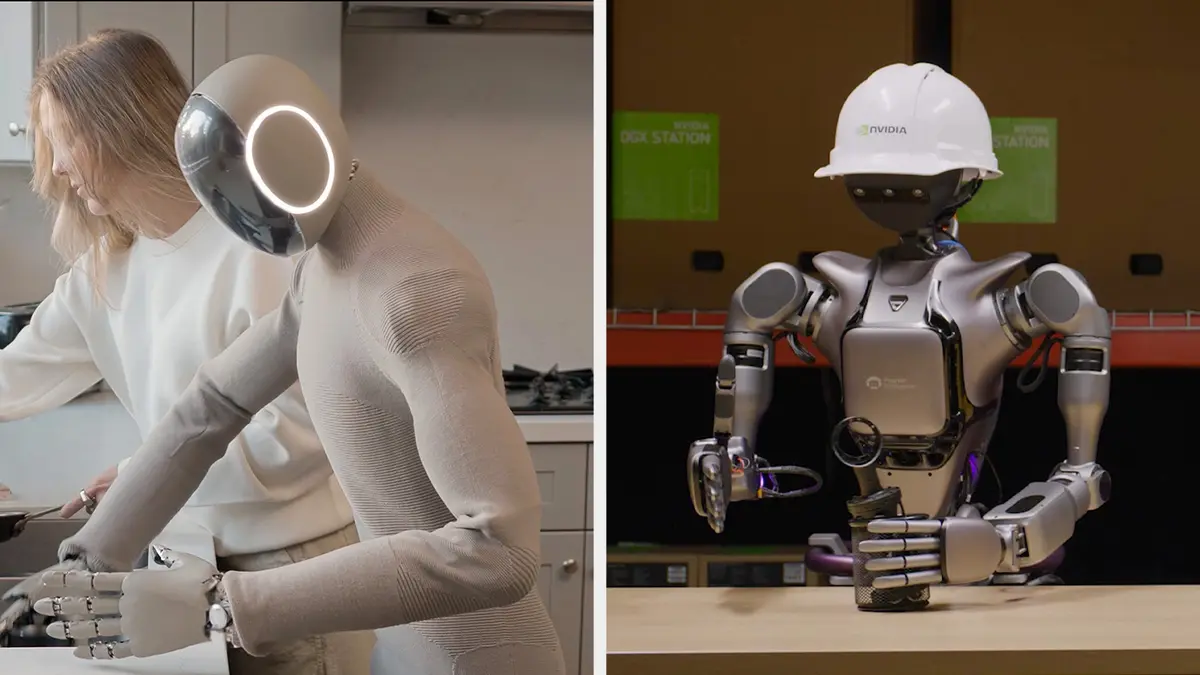
在GTC 2025期间提出的NVIDIA,ISAAC GR00T N1,SO -SO -CALLED模型基本的
专为人形机器人技术设计。这种开源模型的目的旨在通过解释其环境并执行复杂的任务来提高机器人的自主权和能力。它伴随着模拟和数据生成工具,以促进其采用。
专为人形机器人技术设计的模型
ISAAC GR00T N1基于一个具有两个系统的体系结构,灵感来自人类认知功能。第一个快速系统执行本能行动,而第二个系统则分析环境并计划运动。这种方法使机器人可以执行精确的手势,例如输入和操纵对象,还可以执行需要多个阶段的任务。
该模型基于真实和合成数据的混合物。多亏了平台Omniverse,可以生成培训方案而无需收集大量实际数据。根据NVIDIA的说法,这将提高模型的可靠性,同时减少成本和开发时间。

使用Google和…迪士尼开发的物理引擎
NVIDIA并行宣布,牛顿是一款与Google Deepmind和Disney Research合作设计的开源物理引擎。该引擎针对机器人技术进行了优化,并与现有的仿真框架兼容,例如Mujoco和Nvidia Isaac Lab。
迪士尼计划运营牛顿以改善其互动机器人的动画,尤其是那些受宇宙启发的动画。就其作品而言,这是一种旨在加速适用于机器人技术的技术。
多个部门的申请
ISAAC GR00T N1可用于不同领域,特别是物流,行业和健康。 NVIDIA还与GE Healthcare合作开发了医疗部门的特定版本,ISAAC的医疗保健ISAAC。该程序还提供了预训练的模型和模拟环境,以测试自动医疗设备。
像Agility Robotics,Boston Dynamics和Neura Robotics这样的公司已经早日获得了ISAAC GR00T N1。NVIDIA在拥抱面和Github等平台上提供了模型及其相关工具,以促进开发人员的采用。
现在可以在开源中访问ISAAC GR00T N1的培训数据和评估方案。NVIDIA还计划提供个人超级计算机DGX Spark,以促进该模型适应新机器人和环境。
牛顿应该在年底之前获得。